

技术支持:
1. 概述
本方案可以对超过一定声压级限值的户外声源(比如爆炸点定位)进行识别定位,该声压级限值所对应的频率范围可以由用户设置。
2. 方案优点
▲采用MEMS传声器,精度高,稳定性好,一致性较好;
▲体积小、重量轻、便于携带;
▲功耗低、有后备电池,方便户外作业;
▲优化算法、实时性强;
▲事件坐标信息(声源x、y方向的坐标信息)以及原始录音实时传输;
3. 系统组成,工作原理
整套设备由AHAI2001-1s传声器阵列(传声器阵列由至少40个传声器组成),传声器阵列采用多10个小型化的分布式系统组成,AHAI2021采集器(40通道以上),工业计算机,分析软件组成。分析软件分别对信号进行预处理,如滤波等,再通过两两通道之间做广义互相关等手段估计时延,最后根据TDOA定位技术实现声源的空间定位,M为单个小型传声器阵列,如下图中的由图所示。
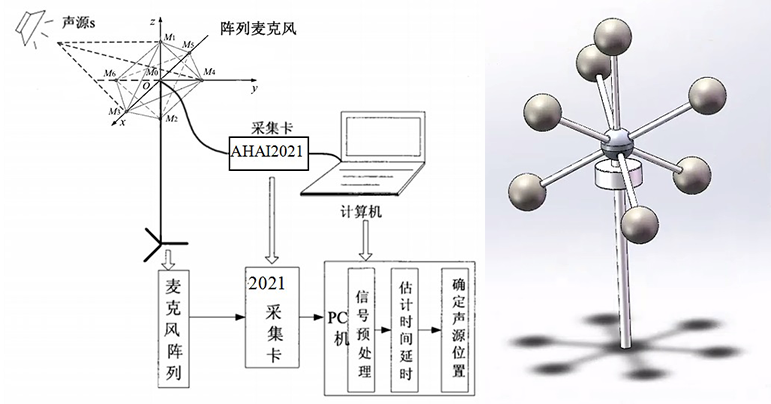
注:传声器阵型和个数可以根据实际情况变动
TDOA定位是一种利用时间差进行定位的方法。通过测量信号到达传声器的时间,也就是距离差,利用两个传声器的距离差可确定一条双曲线,多个双曲线在空间位置的交叉点就是声源的距离。
3.1 爆炸声的识别
对采集到的声音进行时域分析,首先计算背景噪声随时间变化的平均幅度,设定触发声级高于背景噪声声压级,以便使大部分背景噪声不会被认为是爆炸声源,另外爆炸声源一般为脉冲声,且有一定的持续时间,通过设定一定长度的超限时间增加判断依据。另外研究爆炸声的频谱特性,确定主要的频带范围,对采集到的原始波形进行滤波,保留主要声源特性,同时减小环境噪声的干扰。
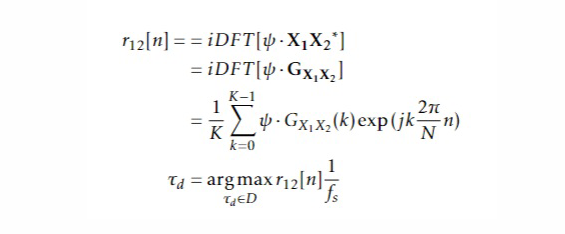
3.2 互相关延时估计
TDOA的核心就是估计传声器对之间的延时,通过求不同路信号的户型给函数的峰值所对应的时间横坐标的值,从而得出时间延时估计的值。估计时延的互相关方法也比较多,常用的是广义互相关函数法,采用不同的加权方式适用于不同的场景。

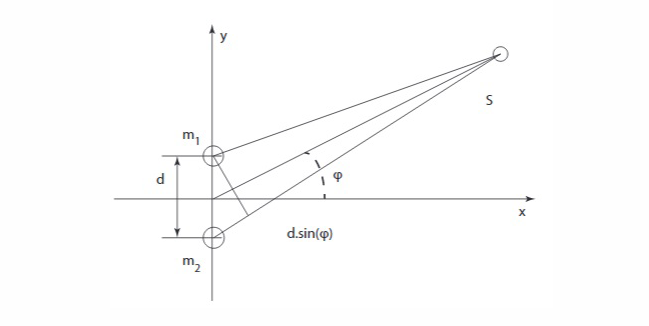
假如有M个传声器,则传声器对有 N= M * (M-1)/2 个传声器对,对于每个传声器对来说,假设声源来的方向可以预估延时用公式表示如下:
td=( d/c)* sinφ
式中,d代表传声器之间的距离,c为声音传播的速度, φ为声源传播的角度。
3.3 单个小型阵列定位原理
以单个立体小型传声器阵列为例,假设M个传声器,则通过上面的公式进行估计TDOAτij。通过传声器
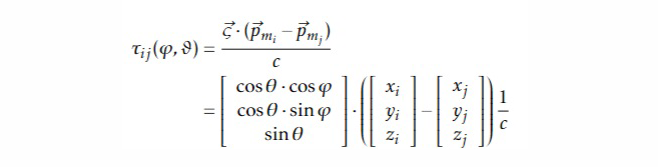
通过假设声源来自不同的角度θ和φ ,每一组角度就有N= M *(M-1)/2个延时,则形成一个预估的延时矩阵

而同时,通过采集到的M个通道的声音,通过互相关法估计实际的测量到的N个延时向量

将实际测量得到的延时向量与预估的延时矩阵进行比对,得出均方差最小的一组角度θ和φ,则说明该声源位于这个方向。
3.4 多阵组合定位原理
用两个传声器阵列(双阵为例),将每个阵列看作一个点,每个点可以确认一组表示声源方向的角度θ和φ,而假如有L个小型麦克风阵列,则可以得到L组θ和φ,其中声传感器阵列B1测得的方位角为φs1, 俯仰角为θs1;声传感器阵列B2测得的方位角为φs2 , 俯仰角为θs2。传感器B1的坐标原点在全局坐标系中为 (x1,y1,z1),传感器B2的坐标原点在全局坐标系中为 (x2,y2,z2)。通过两条不同方向的直线可以确定一个相交点,则这个点是声源的位置 S(x,y,z)。
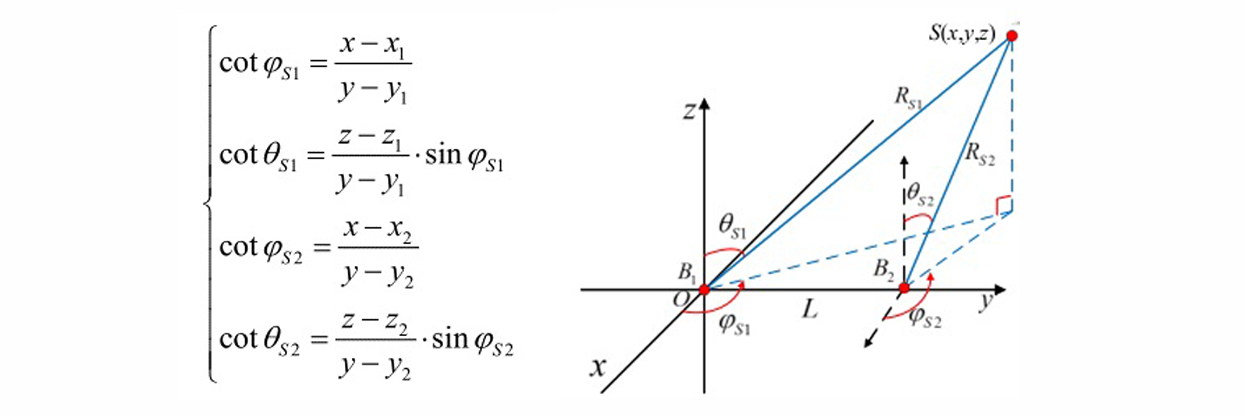
通过求解方程,可以得出声源的位置。
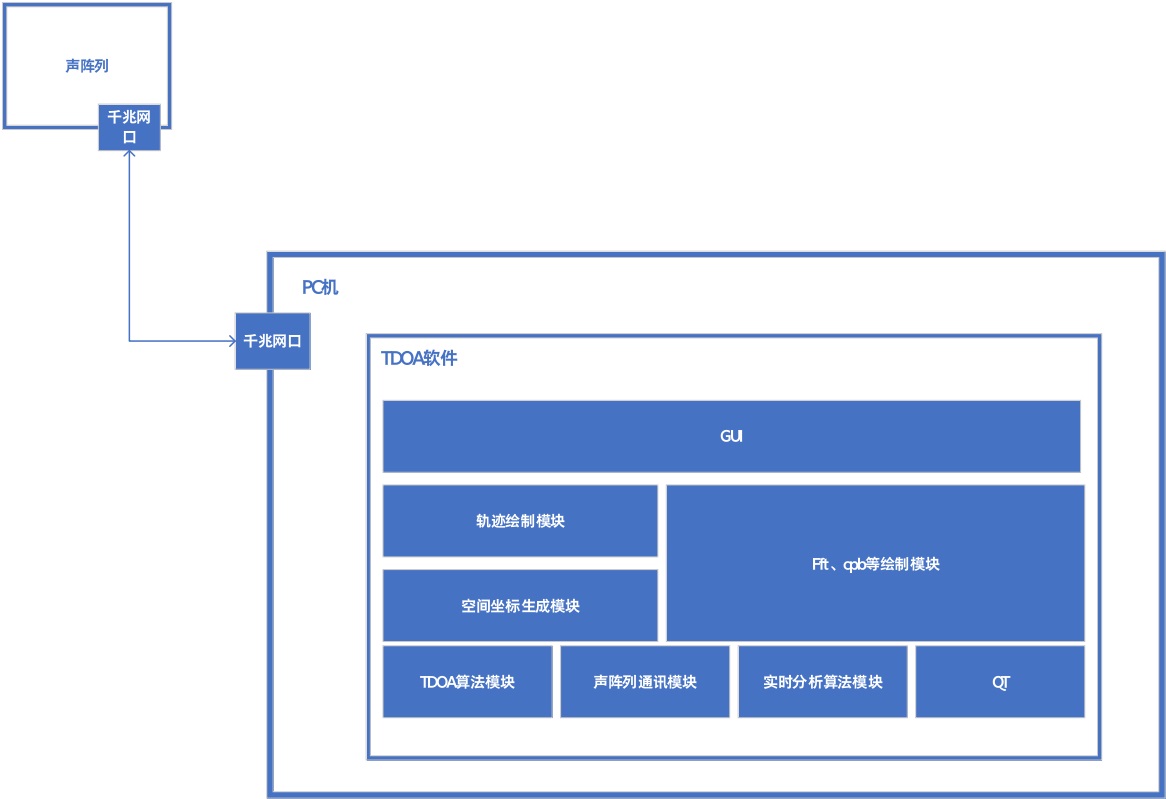
3.5 软件功能
用户可设置目标声源的主要频带并设置声压级限值大小,一旦声压级超标,就可以启动定位功能,并将原始波形文件保存。在获取定位信息后,将定位信息和原始波形一起传给用户。
▲声学分析:声压级随时间变化的曲线、FFT分析、声源定位信息等。
▲软件开发语言: C++
▲GUI框架:QT
▲涉及到的一些技术:多线程编程、网络编程
4. 主要性能指标
4.1 TDOA声阵列:AHAI 2001-1s
|
指标 |
参数 |
备注 |
|
频率范围 |
10Hz - 16kHz |
|
|
动态范围 |
(30 - 120) dB |
|
|
供电方式 |
ICP 2~10 mA |
|
|
传声器数量 |
4-8 |
单个传声器阵列 |
|
工作温度 |
- 40°- 50° |
|
|
外形尺寸(不含支架) |
阵列基线<1 m |
|
4.2 AHAI2021 采集器
|
指标 |
参数 |
备注 |
|
通道数 |
40通道 |
可扩展至80 |
|
采样频率 |
48k Hz |
最大支持64 kHz |
|
相位差 |
<0.1° |
1kHz处 |
|
本底噪声 |
<0.03mVrms @±1V量程 |
|
|
动态范围 |
大于100 dB |
|
|
工作温度 |
- 40°- 50° |
|
|
外形尺寸 |
200×120×40mm |
|
4.3 声源定位
|
指标 |
参数 |
备注 |
|
水平方向距离定位误差 |
RSME 5米 |
定位精度取决于信噪比 |
5. 配置清单
|
序号 |
产品型号 |
主要功能 |
数量 |
|
1 |
AHAI2001-1s传声器阵列 |
4-8个通道的声信号转电信号。 |
10 |
|
2 |
AHAI2021 |
40个通道的电信号高速同步采集 |
1 |
|
3 |
声源定位软件 |
计算声源位置 |
1 |
|
4 |
高性工业计算机 |
含正版windows操作系统 |
1 |
方案设计: 分布式小型化传声器阵列,每个小型传声器阵列成为一个布点,一般由3个以上传声器阵列组成。









